




Майлоочу май бочкалары үчүн ылайыкташтырылган автоматтык жүктөө платформасы
Продукт атрибуттары
| Таңгактоочу материал формасы: PE чарчы чака |
| Бренд: Sunrise Intelligent Equipment |
| Ыңгайлаштырылган: Ооба |
| Транспорт пакети: Wooden Case |
| Колдонмо: Майлоочу май бочкалары |
Продукт этикеткасы
Ыңгайлаштырылган тутум, майлоочу май бочкалары, сорттоо жана азыктандыруу системасы, автоматтык платформа, толтуруучу машина, таңгактоочу машина, таңгактоочу машина, майлоочу май өндүрүү линиясы, ыңгайлаштырылган машина, чечүүчү машина, майлоочу май.
Продукт чоо-жайы
Жабдуулар менен тааныштыруу
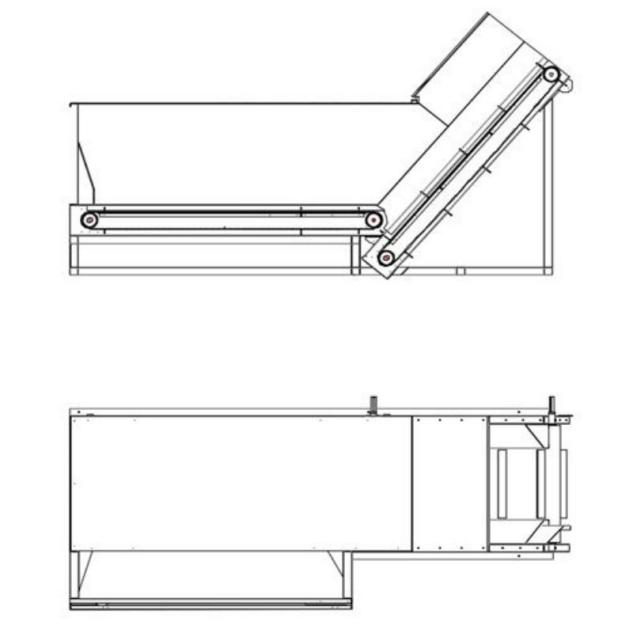
1. Чака көтөрүүчү кур түзүлүш:
Эки баскычтуу ленталуу конвейер мунай бочкаларын белгилүү бир бийиктикке көтөрүп, аны дифференциалдык бөтөлкө менен иштөө конвейерине жөнөтөт.Ремень тосмонун бийиктиги мунай бочкаларынын калыңдыгынын жарымынан азыраак, бул бир катмарлуу мунай бочкаларын көтөрүүгө жана мунай бочкаларынын штабелинин табигый прокаткаланышына шарт түзөт.

2. Дифференциалдык бөтөлкө менен иштөө:
Майлоочу май баррелди бүтүрүү жана ташууну ишке ашыруу үчүн көп секциялуу конвейердин дифференциалдык ылдамдыгы кабыл алынган.Чечкенин өткөрүүчү бөлүгүнүн кире беришинин конвейердик кеңдиги бир эле учурда эки бочканын өтүшүнө мүмкүндүк берет, бул баррельдин өз ара экструзия коркунучун азайтат жана жабдуулардын иштөө туруктуулугун жакшыртат.Көп тепкичтүү конвейердин этап-этабы менен байланышты башкаруусу баррлдин аралыгын тууралоо үчүн.

3. Визуалдык позицияны аныктоо системасы:
Грейфердик конвейердин кирүүчү бөлүгүнө орнотулган.Визуалдык позициялоо системасы жеткирилген мунай бочкаларынын формасынын абалын аныктоо жана аныктоо үчүн сүрөттөрдү тартат, маалымат маалыматын түзөт жана анализден кийин робот системасына жөнөтөт.Инспекция тарабынан өткөн мунай бочкаларынын саны, абалы жана багыты контроллерге жөнөтүлөт, ал эми контроллер алынган сигналдарга ылайык эки жөргөмүштүн колу роботторуна тиешелүү кармоо буйруктарын жөнөтөт.
4. Бөтөлкө менен иштөөчү жөргөмүштүн колу робот:
Визуалдык аныктоо системасы тарабынан жөнөтүлгөн мунай бочкаларынын маалыматына ылайык, мунай челектерин кармап туруу үчүн кармоо абалы автоматтык түрдө жөнгө салынат, ал эми мунай челектери бешинчи огтун таасири астында тескери бурулуп, мунай челектери тик болот жана кол конвейерге бекнтилген.Эки жөргөмүш роботтор жеткирилген мунай бочкаларынын санына жана ылдамдыгына жараша автоматтык түрдө кармоо тапшырмаларын беришет.
5. Калыбына келтирүүчү аппарат:
Анын негизги милдети жараксыз грейдерлери бар мунай бочкаларын чогултуу жана өзгөчө шарттарда жараксыз грейферлери бар мунай бочкаларынын топтолушуна жана бузулушуна жол бербөө болуп саналат.
6. Бочканы тыкылдатуу, бочканы кысуу жана бочканы артка буруу көрүнүштөрү жок, ар бир секциянын конвейер лентасы менен толтуруучу машинанын конвейер лентасынын ортосундагы байланышты жана өтүүнү жакшы кылат.

